Mapping Industry Responding to the Trends of Autonomous Driving

Introduction
Recently, the emergence of autonomous driving technologies that rely entirely on end-to-end AI learning has reignited the fundamental question whether High Definition Maps (HD Maps) are really necessary. The mapping industry is adapting to a sustained trend where commercial passenger vehicles are taking longer than anticipated to reach full self-driving, instead being equipped with Level 2/3 Advanced Driver Assistance Systems (ADAS) for extended periods. Consequently, the mapping companies are shifting their focus: slowing down the expansion of high-cost HD Maps and adopting a dual strategy that prioritizes ADAS Maps for their superior mass-production efficiency. This report examines the indispensable roles that maps must play in autonomous driving and analyzes the methods that major global mapping companies use to develop and commercialize maps for this purpose.
Autonomous Driving: Are Maps Truly Necessary?
The reality is that companies like the UK-based autonomous driving firm Wayve are implementing and commercializing autonomous driving using only cameras, sensors, and End-to-End AI training without HD Maps. This long-standing debate—whether maps are truly necessary for autonomous driving and what their function should be—needs a fresh look.
TomTom, a major global mapping player, lists 11 reasons why maps are essential for autonomous driving.1https://www.tomtom.com/products/orbis-maps-for-automation/ Assuming the continuous evolution of cameras, sensors, and computing power, five core roles for maps in autonomous driving will ultimately remain critical:
High-precision Positioning
Maps do more than just use GPS to determine the vehicle’s location. They leverage pre-stored data to help the system precisely identify the distance and relationship between the vehicle and surrounding objects, for instance, pinpointing the exact lane the vehicle drives.
Safe Path Planning
Setting a safe driving route is crucial for the vehicle to reach its destination. This function cannot be executed without the diverse data maps including road network and location information for the start and end points (geocoding).
GNSS Interference Mitigation
When the vehicle is passing areas where Global Navigation Satellite System (GNSS) signals are temporarily interrupted or lost, such as tunnels or densely built urban areas, alternative means of localization is required. In such segments, relying on pre-stored HD Maps is advantageous for maintaining safe driving.
Safety Assurance
Maps contribute to autonomous system safety by providing an information source that is independent from sensors. Human analysis can predict edge-case scenarios that sensors or AI training might miss. Integrating this information onto a map allows for updating the Operational Design Domain (ODD), which ultimately contributes to better safety.
Simulation
Conducting a simulation within a virtual space that replicates the real road environment is an essential step for training and validating autonomous vehicle AI. Maps provide the foundational data necessary to create this virtual space, or Digital Twin environment.
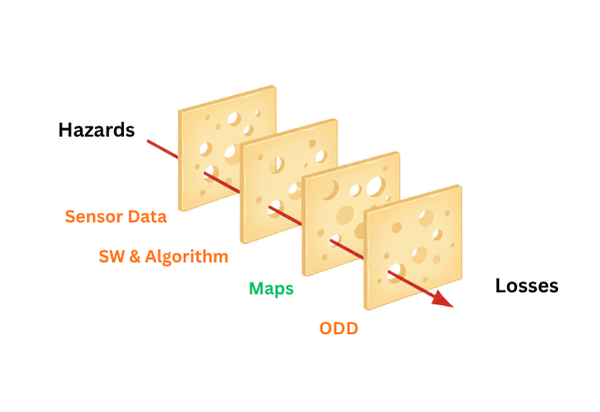
The map’s role in autonomous driving can be understood with the “Swiss Cheese Model” which is a famous theory explaining aviation safety. This model insists that the accident occurs when a single element is not filtered out as it passes through multiple layers of safety conditions (the cheese layers). The mapping industry seems to generally accept that maps do not guarantee 100% operation or safety of autonomous driving. Instead, they function as one of the multiple ‘cheese layers’ within the vehicle’s driving and safety systems, serving to filter out risk factors. The map maker’s objective, therefore, is to minimize the holes in this layer, reducing the chance for errors to slip through. Ultimately, maps provide data that is independent of the sensor system and sensor-data-trained driving patterns, making them a key factor for stability when the vehicle’s real-time system experiences a temporary malfunction.
One of the factors that highlights the importance of ADAS Maps is the evolving regulatory landscape in the European Union (EU). The core of this is the Intelligent Speed Assistance (ISA) system, which will be mandatory in all new cars sold in the EU starting July 2024. The ISA system warns the driver and provides speed limit information by combining map-based speed limit data with vehicle camera sensor data. Global mapping companies like TomTom and HERE Technologies are creating data that meets the regulations for countries where ISA is required and providing it as part of their ADAS Maps.
HD Maps vs. ADAS Maps
In the late 2010s, the autonomous driving map market focused on HD Map development and competed for precision. Anticipating the commercialization of Level 4/5 full autonomy, many mass-production car OEMs urged mapping companies to produce more accurate HD Maps and rapidly expand coverage across key countries. However, the mapping industry became slightly passive about HD Map expansion throughout the first half of the 2020s due to the delay in Level 4/5 technology commercialization for mass-produced vehicles. As Level 2/3 ADAS vehicles continued to be produced and sold for an extended period, the mapping industry’s focus shifted towards ADAS Maps. HD Maps are expensive to produce, so their regional coverage is often limited to specific urban or highway areas requested by specific customers. In contrast, ADAS Maps are comparatively cheaper to produce, allowing them to cover a broader road network and offering an advantage in scalability.
| Feature | ADAS Map (Based on SD Map Matching) | HD Map |
| Autonomous Driving Level | Level 1 to Level 3 | Level 4 – Level 5 |
| Core Objective | Enhancing Driver Assistance System functions and complying with automotive regulations | Ensuring precise vehicle localization, ODD control, and safe autonomous driving in complex road environments |
| Data Precision and Attributes | Road-level (Road shapes and attributes, ADASIS V2) | Lane-level (Lane boundary lines and attributes, 3D geometry, ADASIS V3) |
| Coverage | Broad regional and national coverage | Limited to specific countries, cities, or main roads due to high production costs |
Global mapping companies like TomTom and HERE Technologies currently provide two distinct product families in parallel: ADAS attributes matched to existing 2D maps (Standard Definition Map, SD Map) and high-precision HD Maps.
TomTom offers its core API and navigation SDK products based on ADAS information, along with a solution called Virtual Horizon. Virtual Horizon supports ADASIS V2 communication, predicting the vehicle’s future route and helping to display relevant ADAS/AD information onboard.2https://www.tomtom.com/products/virtual-horizon/ Meanwhile, the HD Map-based RoadCheck solution helps create and control autonomous driving scenarios within the ODD.3https://www.tomtom.com/products/roadcheck/
HERE Technologies also provides data APIs and navigation SDKs. For autonomous driving support, they offer a product suite called HD Live Map, which is organized into three layers. This structure reflects the data precision and functional segmentation required by Level 3 and higher autonomous driving systems.4https://assets.here.com/x7rx8ayph7ee/76cb2704-9a3e-4e0a-b969-d4ace55005de/4a99b2d6acbcf7d8b88fbf8e7fa3ba18/here_hd_live_map_product_one_pager.pdf
HD Localization Model
– Lane and fixed object location information (signs, poles, guardrails, bridges, tunnels)
– Improves accurate vehicle positioning and path prediction
HD Lane Model
– Lane topology, lane boundaries, lane-level ADAS attributes
– Enables lane-unit driving strategy and vehicle control
HD Road Model
– Road network, curvature, gradient, speed limits, etc.
– Used to create ODDs tailored to the local environment
The players creating maps for autonomous driving can be grouped into two main categories based on their data collection and processing methods. Companies adopt one methodology or a hybrid approach, guided by their commercial goals and technical philosophy. A separate category is also examined for autonomous driving companies that claim to have no reliance on maps.
Traditional Field Data Collection
This traditional approach involves driving mobile mapping vehicles equipped with LiDAR to collect 3D point clouds directly from the roads, which are then used to build maps. While suitable for creating Highly precise Maps, it requires high costs.
DMP (Dynamic Map Platform), a Japanese company, primarily uses this method. After acquiring Ushr in the United States, DMP is concentrating on the HD Map business in North America. DMP focuses on producing and supplying highly accurate HD Maps tailored to individual customer specifications. For example, they provide essential Ground Truth data to ensure the safety and reliability of hands-free driving technologies for GM’s Super Cruise.
DMP does not utilize crowdsourcing for updates and does not sell pre-produced maps as a platform or service to various customers. DMP is targeting the global automotive market by expanding HD Map coverage, mainly on motor ways and higher road classes, in Europe, Korea, and Japan, in addition to the North American market.5https://www.businesswire.com/news/home/20250824680583/en/Dynamic-Map-Platform-Expands-North-American-HD-Map-Coverage-to-950000-Miles
Crowdsourcing-based Data Collection
The crowdsourcing method utilizes data collected from sensors (primarily cameras) on numerous mass-produced vehicles to create and update maps. Mobileye is a leader in this area. Through their REM (Road Experience Management) method, they collect data from vehicles worldwide and create a RoadBook used for map production and updates. They have built an independent system that creates maps purely through REM, without integrating data sources from other map companies. This strategy aims to enhance map accuracy and completeness through their proprietary data ecosystem.
Mobileye ensures safety through a distinctive model called True Redundancy, which differs from the standard approach of fusing data from all sources. They create one World Model solely from camera data and a second independent World Model from radar and LiDAR data. Map rules are extracted from these two independently operating models, which are then used to generate policies and the final map. The resulting map is packaged to suit the needs of different autonomous driving stages, extracting the necessary ADAS or HD map attributes.6https://www.mobileye.com/solutions/ Mobileye is expanding this ecosystem through collaborations with OEMs.
Hybrid Approach
Several global players, including TomTom, HERE, and Google’s Waymo, use a hybrid model that combines traditional field collection and crowdsourcing methods.
They typically establish the fundamental layer of a precise and stable HD Map using field collection with high-precision equipment like LiDAR. Then, they integrate a crowdsourcing method that automatically updates the map using sensor data collected from vehicles on roads. This hybrid strategy has become the practical solution for balancing the reliability of high-precision data with the speed required to reflect real-time changes.
TomTom uses a mix of traditional field collection and crowdsourcing to produce and sell both ADAS Maps and HD Maps. Base map data is collected via LiDAR-equipped mobile mapping vehicles, and then data from over 3 million vehicles is used to ensure the data is up-to-date. They are growing their proprietary ecosystem by automatically collecting sensor data when customers use their products.
Last year, TomTom modified its base map format to the Orbis Map, which is based on OpenStreetMap (OSM). The Orbis map is designed to accommodate the overlay of either an HD Layer (3D Lane Geometry) or an ADAS Layer (attribute information of ADAS features on the road network). This represents a shift from providing static map data packages to a modular service platform that allows for flexible layer combinations based on customer requirements.
HERE Technologies also adopts a Self-Healing Map approach, creating HD and ADAS Map-based products by combining LiDAR-based data collection with automatic updates from vehicle sensor data. Similar to TomTom, HERE’s ADAS Map includes data attributes that support ADASIS V2.
Google’s subsidiary, Waymo, directly creates and utilizes the HD Maps needed for its robo-taxi operations. Because the service areas are predetermined, their method is a service-centric hybrid: they create maps by collecting road information in that area via LiDAR, followed by continuous updates using sensor data collected from the robo-taxies.
While the Google Maps Platform does not currently offer an HD Map product suite, it has entered partnerships with OEMs for ADAS Maps. In 2023, they officially partnered with Volvo and Polestar, stating that Google’s map data would be provided for the vehicles’ Pilot Assist function.
Another subsidiary, Waze, provides real-time traffic and road hazard information through community-based crowdsourcing. Although Waze does not produce sophisticated map data like other companies, some of its data features function similarly to the autonomous driving assistance provided by ADAS Maps.
Map Free Autonomous Driving
The Map Free approach involves implementing autonomous driving systems without any reliance on maps. The UK-based autonomous driving firm Wayve claims that autonomous driving control can be perfectly executed through End-to-End AI learning with vehicle sensor data alone, eliminating the need for HD Maps. This approach offers the advantage of bypassing the high initial investment, complex infrastructure setup, and ongoing maintenance costs associated with traditional HD Map production. The potential for a business model that scales globally with only software expansion has attracted major investments from technology companies like Nvidia and Uber.
If Wayve’s AI-based solution can demonstrate safety and reliability equal to or greater than map-based systems, it will fundamentally challenge the long-term viability of the HD Map industry. However, as this is still an early-stage development, its progress needs continued monitoring.
Tesla has officially championed a near Map Free strategy by operating its camera-based Full Self-Driving (FSD). However, it is also rumored—a point requiring confirmation—that Tesla is actually developing and using its own high-precision map layer derived from sensor data collected from its vehicles.
Conclusion
With AI-based autonomous driving solutions that advocate for a “Map Free” approach gaining market attention, the question of whether maps are truly necessary is being debated once more. Nevertheless, maps still play a vital role in ensuring system stability and achieving regulatory compliance, such as with ISA. The crucial factor for map makers is reducing the cost of creating and maintaining maps for autonomous driving and accelerating the update cycle. For map users, the strategic move is to clearly understand which data types and specifications are required for their products and services, and stay flexible to maximize the operational efficiency in the rapidly changing environment.
Discuss with A Piece of Map Inc. for your questions on maps.
Are you managing a large fleet of vehicles or mobile devices? We can find the hidden value of your collected spatial data and develop new revenue models.
Are you searching for new geospatial data? We find and match the most optimized data to your requirements. We also provide from market research, technical evaluation to contract under a seamless, one-stop service.



